


















The technical tour will feature the following labs that are involved in robotics related research at the Karlsruhe Institute of technology:
- The Fraunhofer Institute of Optronics, System Technologies and Image Exploitation (IOSB), Link: http://www.iosb.fraunhofer.de/
- The FZI House of Living Labs, Link: www.house-of-living-labs.de
- Humanoids and Intelligence Systems Lab, Institute for Anthropomatics, Link: http://his.anthropomatik.kit.edu/english
- Institute for Process Control and Robotics (IPR), Link: http://rob.ipr.kit.edu/english/
- Department of measurement and control systems (MRT), Link: http://www.mrt.kit.edu/
- Chair for Pervasive Computing Systems (TECO research group), Link: http://pcs.tm.kit.edu/english/
- Intelligent Sensor-Actuator-Systems (ISAS), Link: http://isas.uka.de
- Computer Vision for Human-Computer Interaction, Link: http://cvhci.anthropomatik.kit.edu
Schedule (6th May, 2013)
Tour starts at 9:00 at the Kongresszentrum and ends at 17:30. Lunch ist included in the registration fee for the tour.
IOSB
The Fraunhofer Institute of Optronics, System Technologies and Image Exploitation researches and develops multi-sensory systems, which help people perceive and interact with their environment. This ranges from the generation and automated analysis of aerial and satellite images to sorting and quality control of bulk goods like coffee beans or minerals. Whenever things are too fast, too dangerous or inaccessible for humans, for example in underwater or contaminated areas, we use mobile robots as sensor carriers and to provide support for assessing the situation. Furthermore, we design perceptual user interfaces for automatic activity recognition to provide an intelligent environment for an intuitive interaction.
Link: http://www.iosb.fraunhofer.de/
FZI

At the heart of the IT region Karlsruhe, the FZI Research Center for Information Technology established the FZI House of Living Labs, a research environment on two floors consisting of seven connected Living Labs. As an integrated research environment it allows the development, integration and evaluation of innovative solution approaches in real-life scenarios, thus supporting participatory research and the development of new technologies. The FZI House of Living Labs supports applied research with the latest equipment and information and communication technologies as well as vehicles, devices and home automation technologies. This approach integrates methods and functions from different disciplines and hence creates new scenarios extending existing technical assistance systems under several aspects. The tour focuses on the Living Labs smartHome, smartMobility, Service Robotics and Automotive.
Link: www.house-of-living-labs.de
HIS
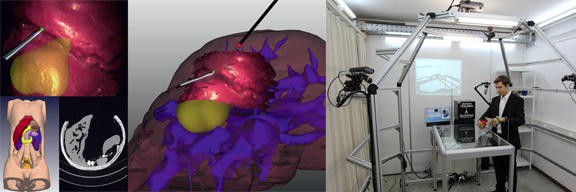
The tour showcases the research work of the Humanoids and Intelligence System lab in the field of medical informatics, probabilistic planning as well as interactive learning and modeling. Systems are presented that support medical diagnosis and therapy with model-based prognoses and knowledge data bases. In particular, the MediAssist system shows how surgeons can benefit from context-aware visualization of navigation information like tumor positions. Furthermore, recent results in automatic scene interpretation and probabilistic planning are presented. The generation of textured 3D models with high precision for the KIT ObjectModels Web Database is shown. Finally, interactive learning of motion planning models for service robots is demonstrated.
Link: http://his.anthropomatik.kit.edu/english
IPR

The Institute for Process Control and Robotics researches in the field of automation and robotics. Main issues are collision free motion planning for different robot control systems and algorithms for model based robot calibration. New methods for intuitive and automatic offline-programming of robots are developed as well. Special stress is laid on human robot co-operation integrating multiple sensors and using several co-operation levels. A special challenge is the usage of sensor based co-operative micro robots with direct drives achieving an accuracy of 20 nm in a FEM. One research team designs modular control and diagnosis systems for robots, robot cells and plants i.e. based on multi-agent architectures. We use case based, signal based and model based methods for service and diagnosis of robotic systems. Further research comprises planning and simulation of the digital plant. In the scope of medical engineering, our research focuses on the future operating theatre and robot assisted surgery. This comprises sensor based autonomous and teleoperated surgical robots, flexible endoscopes, and visualisation systems for the future surgical workplace. Methods for modelling and simulation of anatomical structures, especially bony tissue and soft tissue close to bones are emphasised. These methods are basis for our operation planning systems supporting the surgical intervention as well as the planning of the work flow of an intervention.
Link: http://rob.ipr.kit.edu/english/
MRT
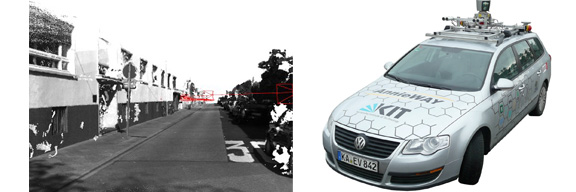
The department of measurement and control systems (MRT) at KIT is headed by Prof. Christoph Stiller and specializes in the development of intelligent sensing techniques for autonomous vehicles (self driving cars, train localization) and for automated inspection tasks. In 2007 the lab’s autonomous vehicle AnnieWAY reached the finals in the DARPA Grand Challenge and in 2011 team AnnieWAY won the Grand Cooperative Driving Challenge (GCDC).
Link: http://www.mrt.kit.edu/
TECO
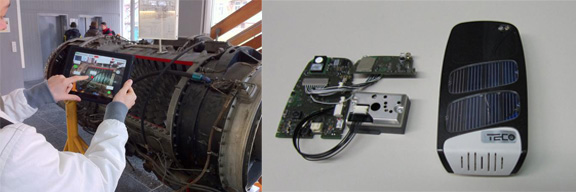
TECO is a research group in KIT’s Institute of Telematics, and was founded in 1993 for research and development in applied telematics. In April 2010, it was attached to the newly founded Chair for Pervasive Computing Systems which was awarded to Prof. Michael Beigl. The focus of TECO’s research is Pervasive and Ubiquitous Computing, with emphasis on Wireless Communication, Embedded Systems, Sensors, Activity Recognition, Context and Situation Awareness and Human Computer Interaction. Notable Contributions include the first mobile browser (“PocketWeb” for Apple Newton), the “MediaCup” Ubiquitous Computing appliance, the “Point&Click” human-computer interaction paradigm and the “Smart-Its” sensor nodes as basis for the first European wireless sensor network.
Link: http://pcs.tm.kit.edu/english/
ISAS

The ISAS laboratory is concerned with stochastic information processing in robotics, telepresence, medical technology, and sensor networks. Fields of work include techniques for nonlinear estimation, control theory, localization, and tracking (with focus on extended objects). Within the scope of the tour we will show selected pieces of our recent work. We start with a demonstration of a method for tracking the surface of a beating heart for medical applications. Then, our research on stochastic control theory is illustrated by taking the example of walking robots. Finally, we demonstrate the current progress of a telepresence system that uses a Microsoft Kinect network.
Link: http://isas.uka.de
Computer Vision for Human-Computer Interaction

The research group Computer Vision for Human-Computer Interaction at the Institute for Anthropomatics, KIT focuses on the exploration of new methods in computer vision to enable detection and analysis of faces and people in both images and videos. In particular, we explore methods for estimating gaze, facial expressions, gender and age as well as recognizing people’s identities. Machine-based visual perception of humans has many applications: to construct user-friendly technical systems such as interactive robots and intelligent environments (ambient intelligence); to empower visually impaired people to perceive their surroundings (assistive technologies); to enhance safety and security; and to improve the search and retrieval in image and video content. During our lab visit we will show – among others – systems for face recognition and analysis as well as systems for multimedia analysis.